Airborne Targets
Aerial Targets#

Note
Aerial targets were introduced in Obriy version 0.6.0 and significantly improved in 0.7.0. Due to active development and constant changes in air-to-air practices, the latest version of Obriy is recommended for the best experience.
Aerial targets are a distinct type of target available for engagement. The practice of engaging such targets differs significantly from ground targets:
- Constantly monitor your altitude and compare it to the target’s altitude.
- Wind at altitudes of 500+ meters is approximately three times stronger than at the surface, with gusts becoming more chaotic.
- Due to the high altitude, correctly identifying your position on the map is significantly more complicated.
- A small aircraft can only be seen from a distance of up to 300 meters (provided there is no analog video distortion).
- Terrain no longer has a noticeable impact on radio signals, but you must still monitor whether the drone remains within the ground station’s beam.
- Electronic warfare is not as effective.
- It is equally vital to monitor battery levels and throttle usage.
Map Positioning#
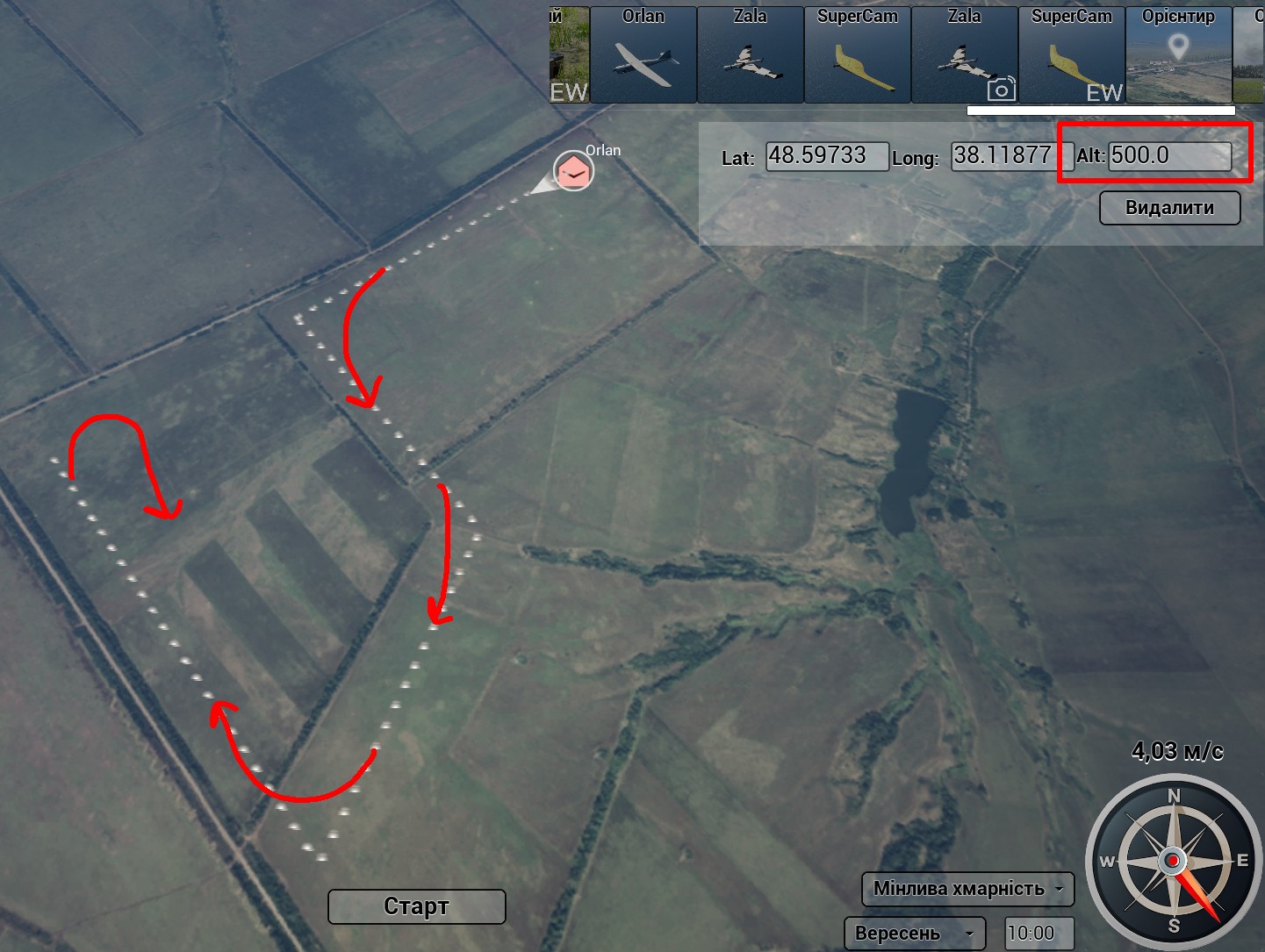
Aircraft cannot stop in midair. At best, they can hover over the ground in strong winds. Therefore, aerial targets are constantly in motion. Without a mission or with a loitering mission, they fly in circles around their last point. Currently, aircraft always loiter in a clockwise direction.
During movement, aircraft smooth out their trajectories and do not follow route lines perfectly. Their turning speed is also very limited.
By default, an aircraft’s altitude is 200 meters above its starting point, after which it remains constant relative to sea level. Altitude can (and should) be adjusted in the aerial target’s marker properties after placement.
Starting from version 0.7.0, aircraft are also affected by wind and gusts. They must actively counteract these forces. When flying against the wind, a target may intentionally increase its airspeed to maintain better ground speed.
Currently, aircraft have flawless geopositioning. They are not affected by EW.
Basic Recommendations for Target Elimination#
Eliminating aerial targets is impossible without additional targeting assistance! Use situational awareness tools.
It is crucial to balance movement speed and efficient battery usage. It is advisable to never raise the throttle above 70%.
Consider the wind effects. At altitude, the wind is almost imperceptible because the drone effectively moves within an air mass. However, in reality, the drone can be quickly carried sideways relative to the Earth's surface. Even a weak ground wind of 5 m/s can reach up to 15 m/s at altitudes above 500 meters.
A navigator's assistance is highly valuable, as the pilot must constantly counteract the wind and search for the aerial target while approaching it. The navigator can assist with map orientation and indicate where the pilot should fly to locate the target.
The situational awareness map can be expanded into a separate window and used on a second screen.
The most optimal choice is to use directional fragmentation munitions with manual detonation. Automatic detonation may not always work in in-air impact. Detonation should be performed from the minimum possible distance, partly because determining the exact distance to the target and whether it will be successfully hit is not always straightforward.
To facilitate faster flight and especially to improve the visibility of targets in the sky ahead, it may be useful to set the camera angle between 10 and 20 degrees. When using directional fragmentation munitions, this means the spread of fragments will be focused below the camera’s field of view.

Typically, an enemy target is visible only from a distance of 200 meters, which means that altitude differences can immediately mislead the search direction and significantly impact the ability to spot the target. Since the drone is not tied to an absolute altitude but only to its starting altitude via a barometer, it is necessary to constantly compare the drone’s altitude with that of the target.
Note
The average terrain elevation in the Donbas region is approximately 200 meters.
To simplify the exercise, the GPS module can be enabled on FPV drones. However, it is also vulnerable to EW interference (provided there is a ground station, which is a mandatory requirement for initiating radio simulation).
List of Aerial Targets#
The speed listed with slashes represents the target’s constant speed variation after detecting an attempt to destroy it. This is because the target becomes aware of the attack and deprioritizes motor efficiency and battery usage.
Without special modifications, an aerial target will never be able to see a pursuing drone and, accordingly, will not react to an attempt to shoot it down.
Maximum speed is the highest constant speed an aircraft can achieve to counteract wind.
Escape speed is the temporary speed a target can reach in an attempt to evade a pursuing drone.
EW refers to the specific power output per control channel.
| Name | Loitering | Cruise | Maximum | Escape | EW |
|---|---|---|---|---|---|
| Orlan | 20 m/s | 25 m/s | 28 m/s | --- | --- |
| Zala | 19 m/s | 23 m/s | 26 m/s | --- | --- |
| Zala with camera | 19 (22) m/s | 23 (25) m/s | 26 (27) m/s | 32 m/s | --- |
| SuperCam | 21 m/s | 26 m/s | 30 m/s | --- | --- |
| SuperCam EW | 21 (24.5) m/s | 26 (27.5) m/s | 30 (31) m/s | --- | 1W |
| Shahed 136 | 50 m/s | 54 m/s | 58 m/s | --- | --- |