Дрон зі стабілізованою камерою
Режим польоту на дроні зі стабілізованою камерою#
Для польотів в цьому режимі потрібно вибрати дрон зі стабілізованою камерою.
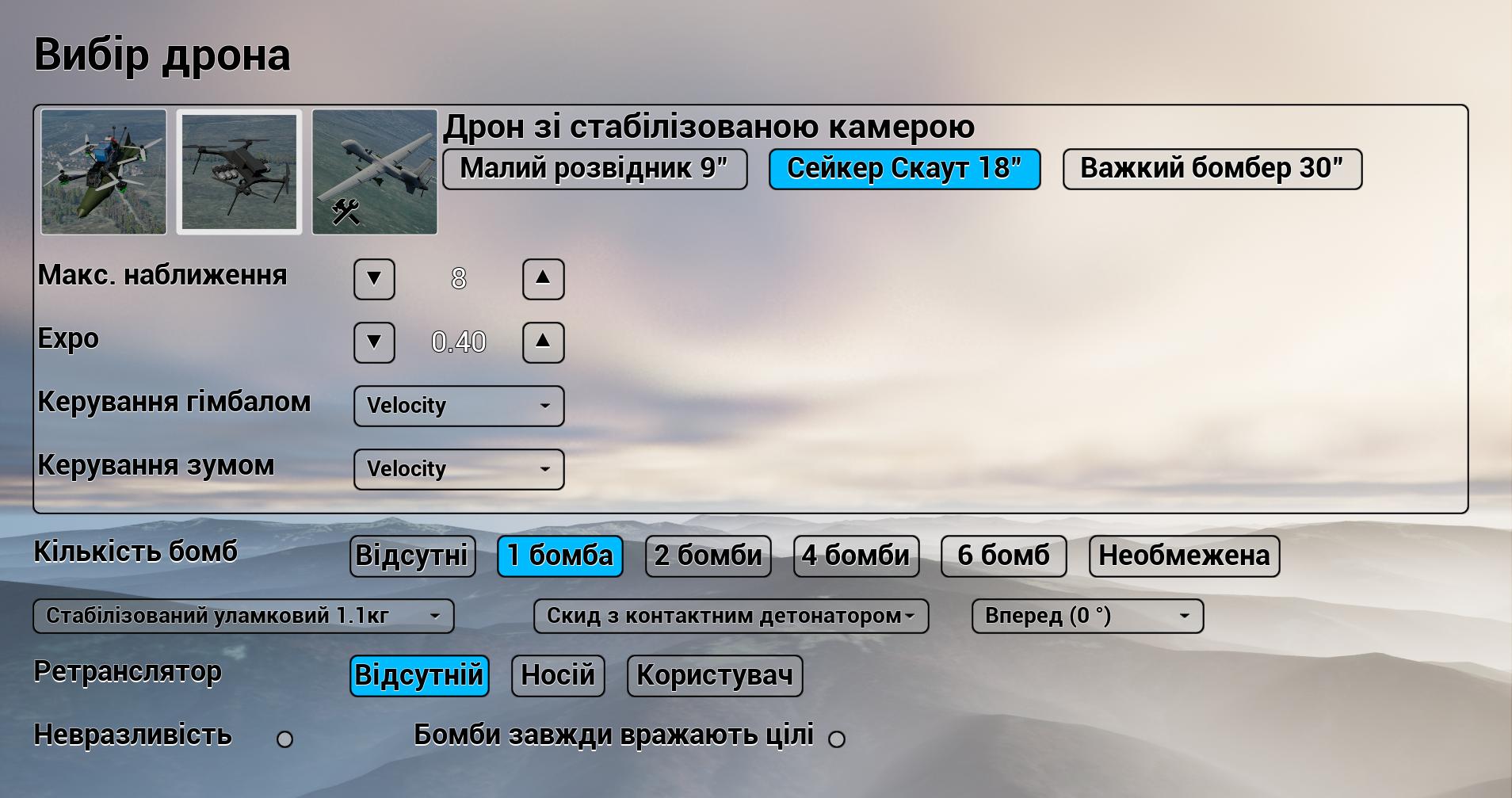
Наразі доступні наступні моделі дронів:
- Малий розвідник – може нести не більше ніж 0.5 кг. навантаження, але маневрений та швидкий;
- Сейкер Скаут – середній розвідувальний дрон з великою дальністю польоту і автономністю (для батареї 30 000 mAh — 40 хв), може нести до 3 кг. навантаження;
- Важкий бомбер – може нести 10 та більше кг навантаження, є усередненою моделлю від різних виробників. Занадто важкий та незручний щоб проводити розвідку.
Налаштування пульта#
Також потрібно налаштувати інші канали в моделі пульта.
Для Radiomaster Camera Pitch та Camera Zoom налаштовуємо на перемикачі S1 та S2. Тому що тільки вони дозволяють плавно регулювати зміну положення перемикача, що вкрай важливо при роботі з підвісом та плавним зумом.

Так само як і з FPV-дронами, далі обираємо на локації місію чи вільний політ. В нижньому лівому куті маємо побачити повідомлення із вибраним дроном та його конфігурацією. В меню брифінгу розставляємо потрібні нам позначки, за потреби виставляємо ємність батареї, висоту антени та натискаємо “Старт”.
Особливості керування та польоту#
Варто звернути увагу на те, що камера також стабілізована по горизонталі. Це означає, що камера не завжди спрямована туди, куди фізично спрямоване тіло дрона. Орієнтація дрону може змінюватись не очевидним чином під-час маневрів, за рахунок того що прошивка компенсуватиме різні сили. Це візуально помітно при повороті вправо/вліво, бо камера довертається з невеликим відставанням. В такому випадку можна побачити "лапи" дрона, або пропелери при великих поворотах, тобто спершу починає поворот дрон, і на частку секунди пізніше починає повертатись камера. Але показник компаса зорієнтований відносно самого дрона, а не камери. Майте це на увазі. Тому компас може рухатись, коли камера ще ні.
В версіях до 0.8.0 камера поверталася разом з дроном синхронно.
Режими польоту#
В гімбального дрона доступно два режими польоту: утримання висоти (Altitude hold) та утримання позиції (Loiter).
В режимі Altitude hold дрон намагається утримувати висоту відповідно до показів барометра.
В режимі Loiter дрон буде намагатися триматися нульової швидкості (на відміну від справжнього лойтера, який тримається точки), через що дрон автоматично протидіє вітру, але стає дуже вразливий до РЕБ, оскільки дя цього потрібен GPS. В режимі лойтер дрон намагається досягнути максимальної швидкості, а не максимального кута. Через це в більшості випадків дрон в режимі лойтер літає повільніше.
Реакція дрона на РЕБ#
Відео зазвичай втрачається саме через те, що дрон виходить із поля зору наземної станції. Відео також може бути заглушене у випадку, якщо в полі зору наземної станції знаходиться РЕБ. Такий сценарій особливо ймовірний, коли використовується ретранслятор, оскільки ретранслятор знаходиться високо та буде добре видимий для ворожого РЕБ. Якість сигналу відео ніяк не залежить від того чи діє РЕБ на сам дрон - оскільки дрон лише випромінює сигнал, а приймає його наземна станція, яку й можливо заглушити.
Супутники GPS дуже просто заглушити, та в цілому вони будуть зникати, якщо дрон потрапить у поле дії будь-якого РЕБ. При поганій якості GPS втрачається позиціонювання дрона на мінікарті та перестає працювати режим Loiter, який сильно залежить від можливості визначити точну швидкість та позицію дрона.
Керування дроном втрачається або через те, що дрон зникає поза радіогоризонтом, або через те, що РЕБ діє на дрон і заважає йому прийняти сигнал від наземної станції. Оскільки для керування дроном треба тільки маленьку кількість інформації, керування багаторазово дублюється, і загалом сигнал є достатньо стійким, щоб його було нелегко заглушити. Зазвичай керування втрачається тільки вже поруч з системою РЕБ.
Дрон зі стабілізованою камерою в Обрії запам'ятовує останній сигнал керування протягом 0,5 с, тому після втрати сигналу дрон зупиниться. Слідкуйте уважно за показником LQ оскільки відео-завади не є індикатором РЕБу.
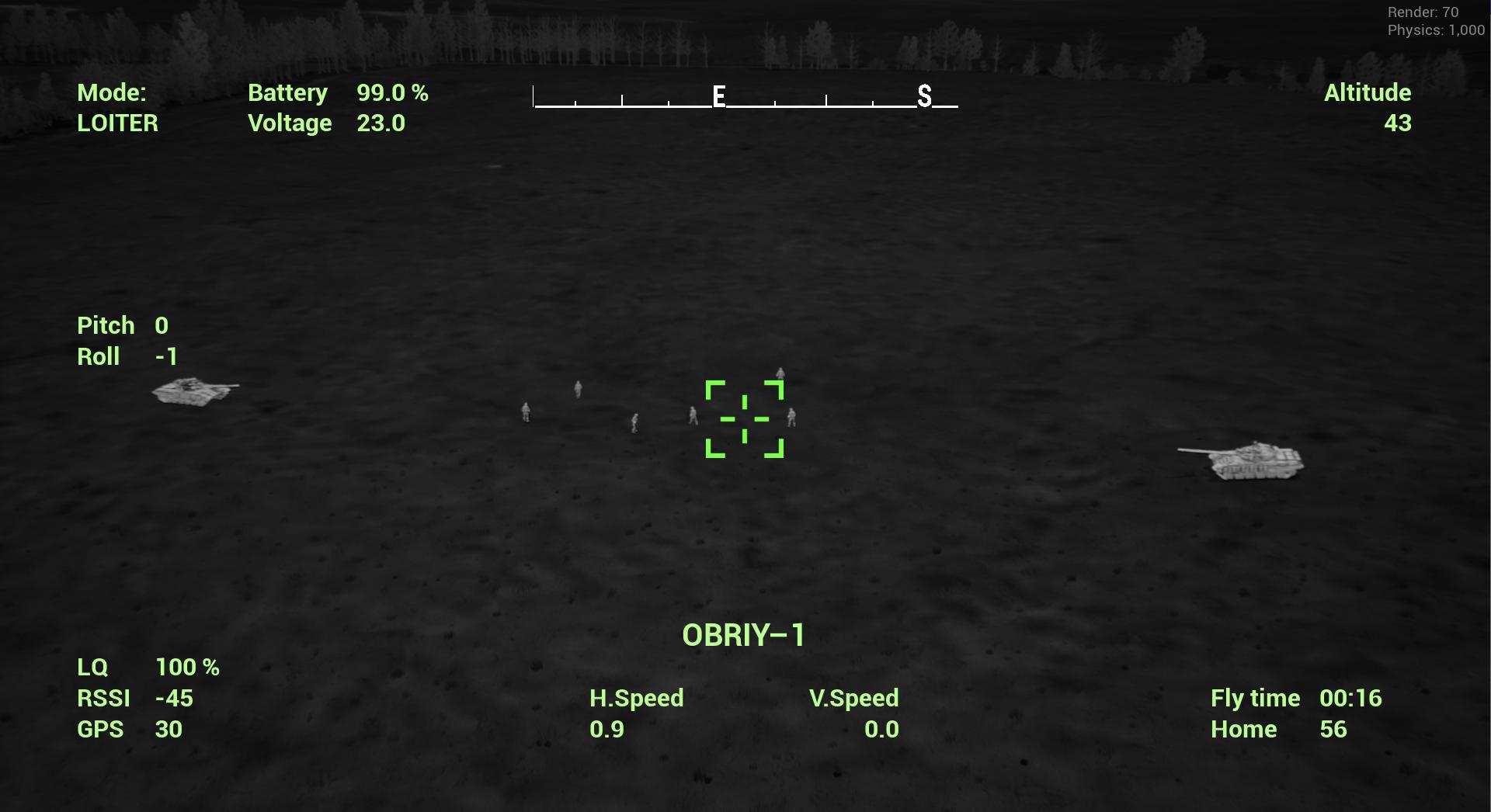
OSD дрона-розвідника#

- Mode - режим польоту.
LOITER/ALT HOLD(Altitude hold). - Battery - рівень заряду батареї, %.
- Voltage - напруга батареї, В.
- Компас.
- Altitude - висота польоту в даний момент часу, м.
- Pitch - кут нахилу дрона вперед (оскільки камера стабілізована, то візуально це не видно).
- Roll - кут нахилу дрона вправо-ліво (оскільки камера стабілізована, то візуально це не видно).
- LQ - Якість зв'язку, %.
- RSSI - потужність сигналу від антени.
- GPS - кількість видимих супутників.
- H.Speed - швидкість переміщення дрона по горизонталі, м/с.
- V.Speed - швидкість переміщення дрона по вертикалі, м/с.
- SIMULATOR-1 - нумерація вильотів.
- Fly time - час польоту.
- Home - відстань до точки зльоту, м.
Заведення моторів (Arm).#

На відміну від FPV, розвідувальний дрон заводить мотори аналогічно Mavic, тобто потрібно звести стіки по діагоналі в середину і вниз.
Далі додаємо тротл (газ), набираємо висоту, літаємо, працюємо гімбалом та зумом камери для розвідки.
Відпрацювання скидів по техніці та піхоті#
На відміну від ударного FPV дрона, тут є можливість повернути камеру в надир і відслідковувати, як бомба летить на ціль. Маючи налаштовані канали для скидів можна ставити більше ніж одну бомбу одномоментно.
Режим коригування артилерії#
Піднімаємось на дроні в повітря, знаходимо нашу ціль. Далі за допомогою Кропиви чи іншого картографічного сервісу прив’язуємо ціль до карти і беремо її координати у форматі десяткових WGS84. У нашому випадку це 48.561616, 37.986118.

Натискаємо клавішу Q – вона відкриває панель коригування. Вводимо широту (1) та довготу (2). Натискаємо “Вогонь” (3).
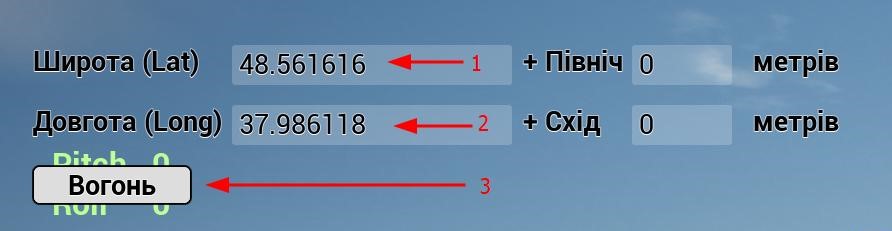

Артилерія через декілька секунд нанесе вогневе ураження за заданими координатами.

Спостерігаємо, де відбувся розрив. Після чого змінюємо координати чи вводимо відстань в метрах, куди треба змістити “постріл”, щоб попасти в ціль (якщо потрібно змістити на південь чи на захід, то треба вводити від'ємні значення).
Режим польоту з тепловізійною камерою#
Цей режим можна застосовувати як для FPV дронів так і для гімбальних.
Якщо реальний дрон, для якого ви відпрацьовуєте тренування, має тепловізійну камеру, то необхідно зайти в Меню “Графіка” та увімкнути Теплову камеру.
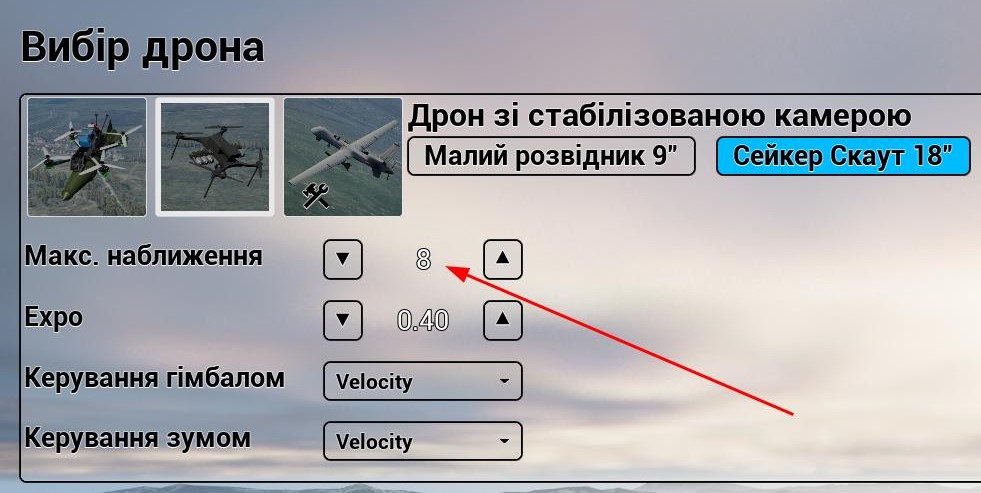
Після цього потрібно зайти в налаштування дрона і налаштувати максимальне наближення камери відповідно до своєї моделі камери.
Також варто зауважити, що якщо обрати денний час для місії (під час налаштування місії, див. розділ Тактична мапа), то в режимі тепловізора все буде надто яскраве, і роздивитися цілі буде дуже складно, а за нічних умов польоту можна чітко роздивитися цілі на фоні ландшафту.